I just published updated project on GitHub
It is Arduino based converter for processing Mavlink telemetry data and send them in Duplex format (Ex but also old text one) into your receiver (and down to earth)
Features :
- sending data over Ex protocol
- sending data as text to even old Jetiboxes (include messages)
- Alarms
Here is wiring, it is really simple : 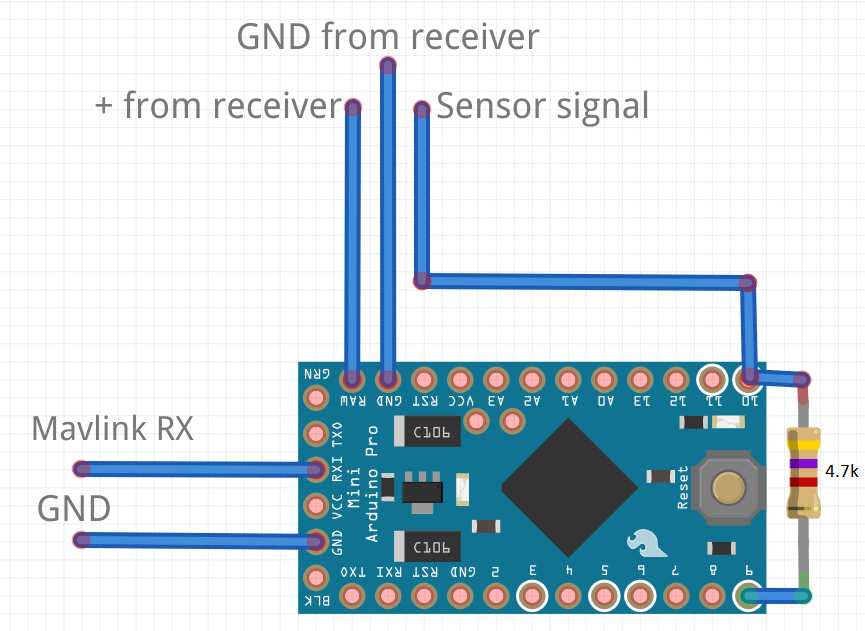 Code using one hardware serial for reading telemetry from Mavlink board (ArduCopter or MegaPirateNG) and output data into Jeti as software serial. Here is video to show Alarms https://www.youtube.com/watch?v=bKOuzuYNKlU
Code using one hardware serial for reading telemetry from Mavlink board (ArduCopter or MegaPirateNG) and output data into Jeti as software serial. Here is video to show Alarms https://www.youtube.com/watch?v=bKOuzuYNKlU
Hi,
I’m very impressed about your work! Congrats. I have two questions
1) What’s the difference between Jetibox.ino and MAVlink.ino?
2) Did you connect a PPM Jeti Receiver to APM 2.6? I have connectet an old Rsat receiver, and cannot get channels in right order to APM. what receiver type do you use?
Thanks
Franky.
Hi
1 – jetibox.ino is communication layer, mavlink.ino parsing data from source and fill values for jetibox.ino
2 – I am using MPNG firmware with PPM Jeti. So maybe it will not be fully same but what I did is channel order Graupner or MultiWii (not sure now) and what was really necessary, I switched RSat to emit only 8 channels instead of full 12. Without this change I was not able to get RC signal into copter
Hi, first of all: Thanks,for your great work!
I am using mav2duplex with megapirate and a Jeti DS 14. The only thing that is a little bad is the huge delay betwen the Mavlink and the Jeti-telemetry. Do you have any idea how to speed things up?
Thanks,
Hauke
I will try to speed it up in next release for some important data (like ARM/DISARM status) but telemetry protocol is slow (9.6K non duplex) so there is not too much way to improve
Hi, I can’t get this to compile using the Arduino-IDE. Which version did you use to build mav2duplex?
/Malte
Arduino 1.0.6 should be fine and I am using it.
Hello! i also have trouble with the update rate on my DC16.
Where can i find your latest release? The version on github is 9months old.
Thanks
Latest release is on github but I have planned update for next few weeks. And yes, update rate is one of issues. Unfortunately it is not possible to speed it all (protocol is slow) so I will probably split it into priority groups and each will be send with different update rate.
Hello
Any chance of an arduino hex?
Compiling this seems to be a bit of a mess!
Rob
Busy now, send me not to info@devfor8.com during next week and we will see what we can do
Hi, thnx for this nice little tool
i just have a question. im using an APM 2.6 with FW 3.2.1
it seems to work so far with the MAV2Duplex, but a few things are strange.
i had to connect hte Mav2Dupleyx not to RX of the APM but to TX, which made
sence to me since i want to receive data from the APM so APM has to transmit.
Well, im getting some data, e.g. that im missing a 3D Fix, YAW, Roll, PIT aso
also the Flight modes are displayed, but what im not getting is battery voltage and current (power -1V, -1A 0mAh). But in the Mission Planner its been shown propperly
when i connect via USB
So i dont know if those values are simply not transmitted, or its not beening processed by Mav2Duplex
Ill have a look in the code too, but maybe you already know what might be the problem….
thnx
Helmar
well, after i amed tho copter once, im getting now voltage an current, so mabe its just working during flight ?!
But what im missing atm is the GPS data, everything 0 but my gps led tells me it has a 3D FIX …
Hi, ive still little trouble with the telemetry data. If i start the copter there is no telemetry
coming through. I always need to connect it to USB to my PC after i disconnect there is
some telemtry coming through until next power up.
Im using a DC-16 and APM 2.6. The DC16 reports 15 Sensors, is this correct ?!
The virtual JetiBox of my DC-16 shows some more Infomation like fligkt mode, where i cant find a sensor for. Sometimes the JetoBoxrandom symbos like ? and ° in places
where is does not belong .
I think im missing some information about the settings i need to do at the APM
has someone a working setup and can tell me which parameters are important for the mav2duplex to work propperly ?!
thnx
Helmar
Telemetry output needs to be enabled. You can do it with “Enable OSD” in Mission Planner as OSD using same data as Mav2Duplex. 15 sensors is correct. Can you send pictures of problem symbols to info@devfor8.com ?
Parameters are problem because each person prefers different set of them.
Look at http://www.rcgroups.com/forums/showthread.php?t=2112910 , there is discussion about parameters and also other users with DC-16 so you can discuss it with them.
Hi, I’m trying to compile but getting lots of errors. I was using Arduino 1.8.2 and I revive a simple message of :- can not compile for this board…
Installed Arduino 1.0.6 and I receive pages of errors.
Board= Teensy-LC
Any chance of a hex file please?
Teensy-LC using completely different processor than small duinos. Unfortunatelly this processor is not supported. I am working on support for AtMega32U4 as it started to be common in small ones but CortexM0 is not on my list